Becker, Tyler: Collision Avoidance for Full Four-Wheel Nonlinear Vehicle through Model Predictive Controller
Title: Collision Avoidance for Full Four-Wheel Nonlinear Vehicle through Model Predictive Controller
Name: Tyler Becker
Major: Aerospace Engineering
School affiliation: School of Engineering
Programs: Aresty – RA Program
Other contributors: Daniella Chung, Annalisa Scacchioli
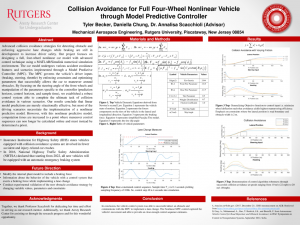
Abstract: Advanced collision avoidance strategies for detecting obstacle and enforcing aggressive lane changes while braking are still in development to increase driver safety. Our project focuses on designing a full, four-wheel nonlinear car model with advanced control technique using a MATLAB/Simulink numerical simulation environment. The car model undergoes various accident avoidance features and scenarios implemented through a Model Predictive Controller (MPC). The MPC governs the vehicle’s driver inputs (braking, steering, throttle) by enforcing constraints and optimizing parameters that successfully allows the car to maneuver around obstacles. By focusing on the steering angle of the front wheels and manipulation of the parameters specific to the controller (prediction horizon, control horizon, and sample time), we established a robust control system able to complete the ultimate task of collision avoidance in various scenarios. Our results conclude that linear model predictions are merely situationally effective, but most of the driving scenarios necessitate the implementation of a nonlinear predictive model. However, with this nonlinear predictive model, computation times are increased to a point where maneuver control sequences can non longer be calculated online and must instead be determined a priori.