Persikov, Nikita: Adaptive Fault-Tolerant Control System Design for a Fixed-Wing UAV
Title: Adaptive Fault-Tolerant Control System Design for a Fixed-Wing UAV
Name: Nikita Persikov
Major: Aerospace Engineering
School affiliation: School of Engineering
Programs: JJ Slade Research Program
Other contributors: Laurent Burlion
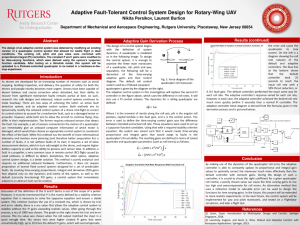
Abstract: The design of an adaptive control system was obtained by modifying an existing version of a quadcopter control system that allowed for stable flight in ideal conditions. The existing roll, pitch and yaw rates were corrected with proportional-integral (PI) controllers. The constant P and I gains were modified to be time-varying functions, which were derived using the system’s Lyapunov function candidate. After testing on a Simulink model, this system will be uploaded to a Pixhawk-controlled quadcopter to be tested in a hardware-in-the-loop experiment.