How fish navigation mechanisms can be employed to develop a zero-order optimization strategy?
Find out in our recent work, where we explore the connection between fish navigation, optimization, and robot target tracking applications.
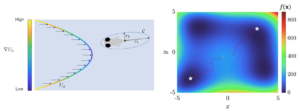
Abstract: Animal navigation has been an invaluable source of inspiration for designing different engineering solutions ranging from optimization strategies to control solutions for complex systems. Recent results indicate that zebrafish larvae could exploit local inhomogeneities from the background flow to orient and navigate against a flowing current, a behavior known as rheotaxis. It has been hypothesized that rheotaxis can be explained through a simple yet effective mechanism consisting of the computation of a line integral around the fish body. However, the exact nature of the information generated by these computations has yet to be established. Motivated by these observations, we studied how zebrafish larvae can estimate gradients of continuous scalar functions using local information only. Interestingly, we found that line integrals, representing flow measurements around the fish body, can provide accurate gradient estimates. This result establishes a connection between the rheotaxis mechanism based on line integrals and optimization methods relying on zero-order information (local measurements). We then formulated a zero-order optimization strategy and studied its convergence for planar objective functions. By applying the descent lemma and leveraging the L-smoothness property of the objective function, we derived necessary conditions ensuring the strategy’s convergence to a stationary point. The effectiveness of the zero-order approach was illustrated via numerical examples and the application to target localization problems in mobile robots.